はじめに
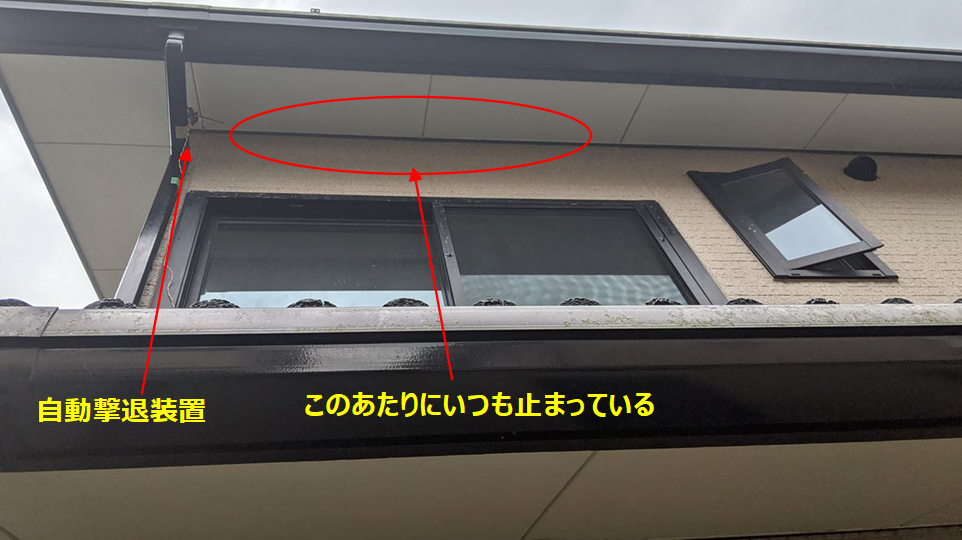
毎年 5 月から7月になるとどこからともなくコウモリがやってきて自宅の 2 階階段付近の軒下を寝床にする。朝になると屋根が糞だらけになっていることも多々ある。 効果のほどはよくわかないけど蚊取り線香だとかコウモリ忌避スプレーなどで追い払っている。ただ、蚊取り線香は毎晩やらないといけないし、コウモリ忌避スプレーはハッカ性のもので直接コウモリにかけると効果的であるが、夜なので常に見張っていることもできないためそのタイミングが難しい。また、このコウモリ忌避スプレーは連続 45 秒間の噴射する程度の容量しななく、それで\1,000 くらいするので、効果的に使いたいものである。
自動監視・噴射装置の開発
コウモリが来たタイミグで噴射するのが一番いいので、コウモリが飛来したことをセンサーで検知し、忌避スプレーを自動に噴射する装置を製作することにした。
今回はシンプルな構成とした。CPUは5Vのモバイルバッテリ、あるいは相当の電源で動作するようにする。
スプレー発射部
スプレーボタン押下部
市販の一般的なスプレーを使用するのでこれを遠隔かつ自動で噴射する機構が必要となる。
さて、ここでどうやってスプレーを機械的に押し込むかということである。
実際に押し込み噴射するときに必要な押圧を測定すると約2kgfの力が必要だということがわかった。
そこで、構造体的に以下のようなモーメント力を用い、Wにスプレーヘッド位置、力点にサーボモータを取り付けることにした。このモータのトルクは1.8kgf・cmということで、モーターのところで1.8kgfくらいあればテコの作用を使用すれば問題なくスプレー噴射ができそう。
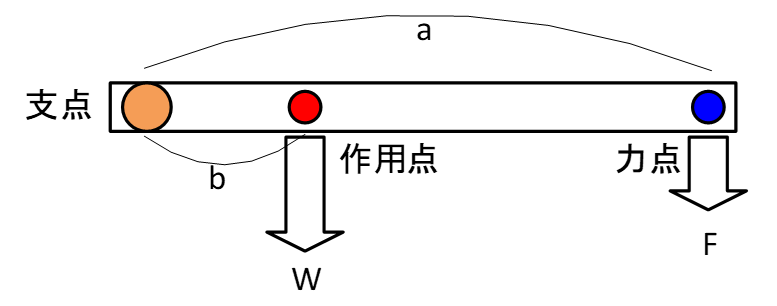
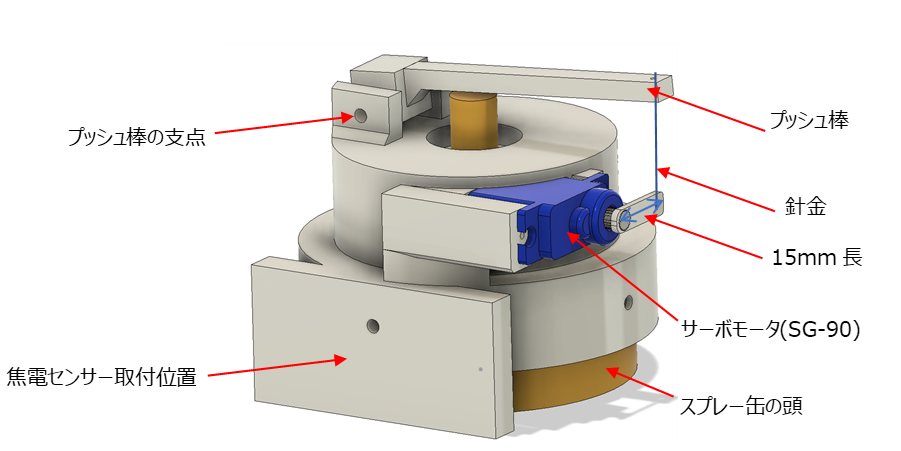
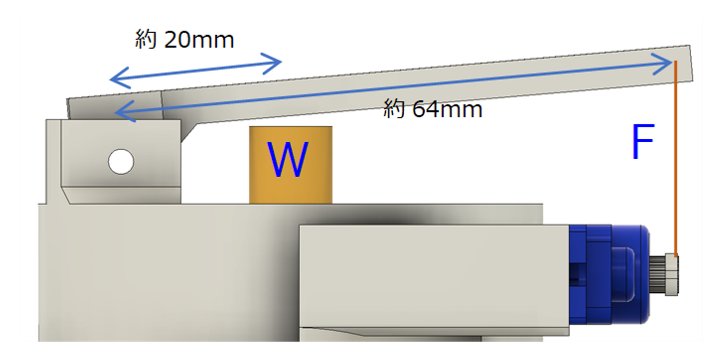
サーボモータ付属のバーが15mmなので、プッシュ棒を押す”F”位置での力はサーボモータ(SG-90)が引っ張る力である。
1.8kgf*10/15=1.2kgfとなる。
プッシュ棒の支点、作用点、力点の関係からFで印加された力はWの位置で64/20=3.2倍となる。
今もサーボモータのFの位置では1.2kgfで、W位置ではこれが3.2倍となるので3.84kgfの力が印加されることとなり、スプレーはサーボモータ+機構部品により噴射できそうである。
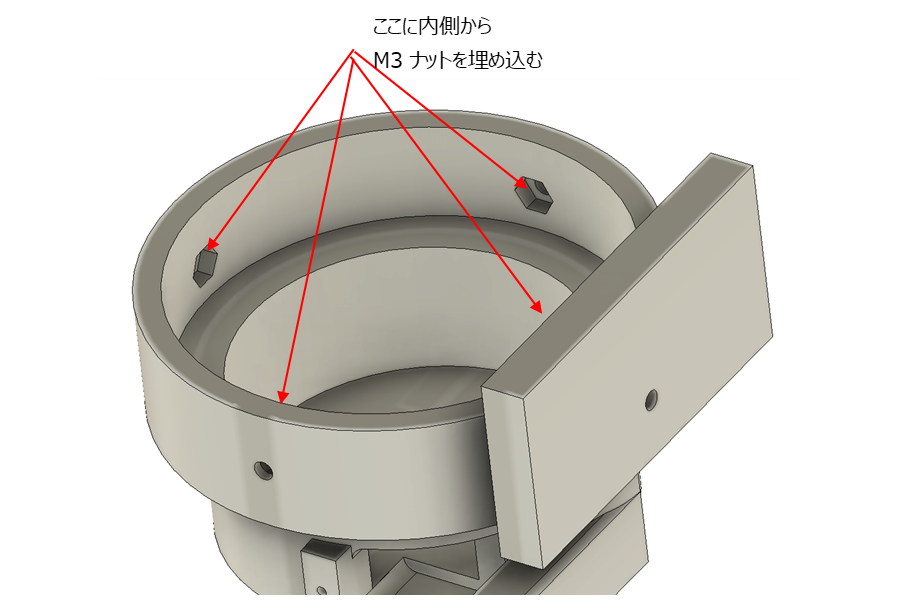
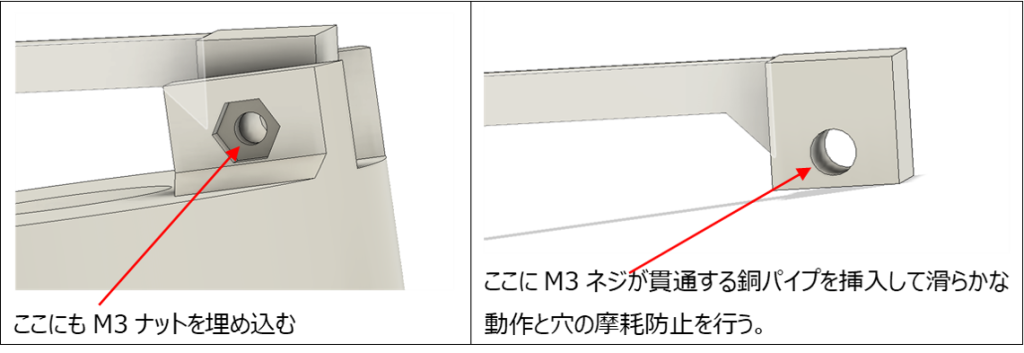
缶固定部
サーボモータをつけたスプレーキャップを缶固定するには内側4か所にM3ナットと埋め込み、外側からM3ネジで缶に加締めて固定する。

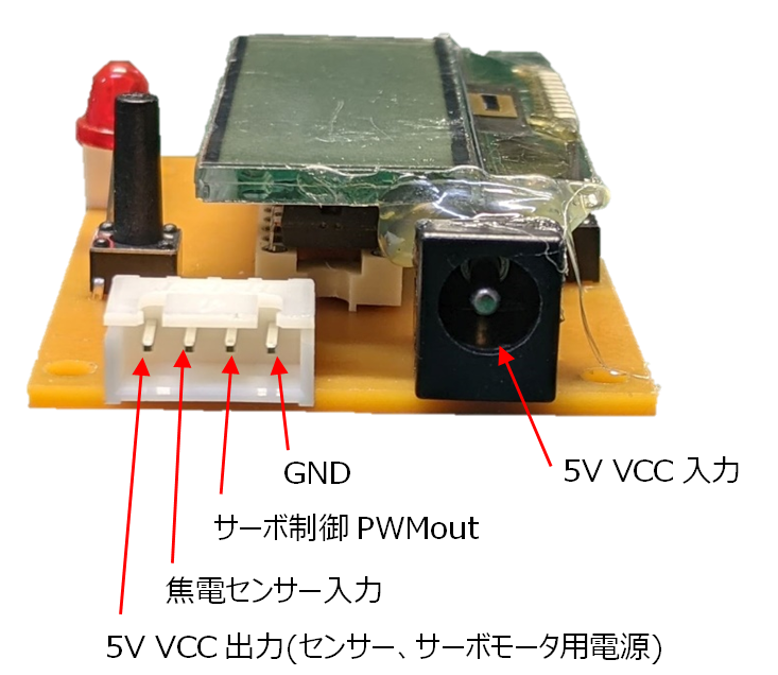
制御回路部
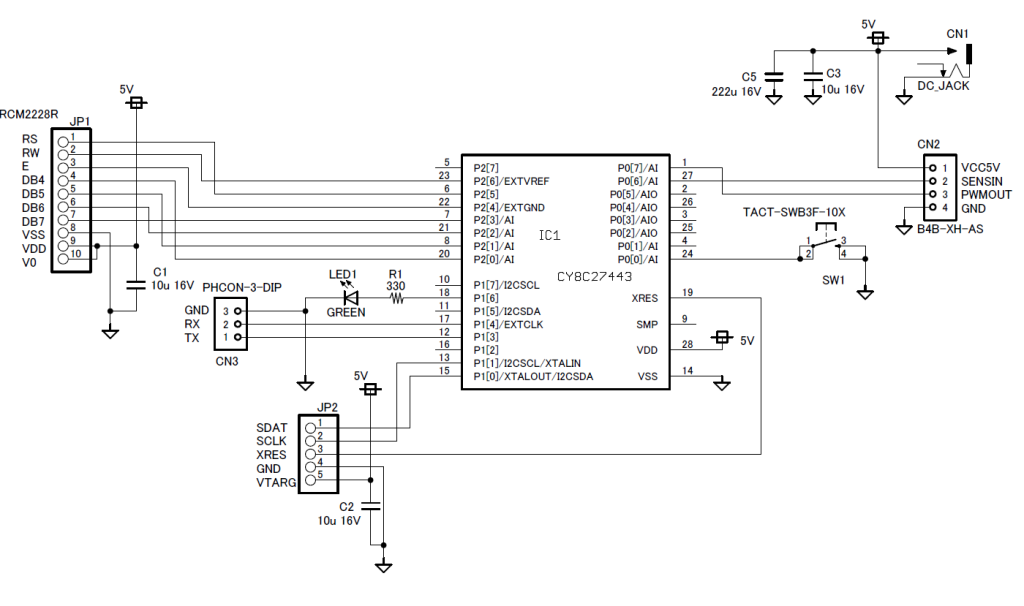
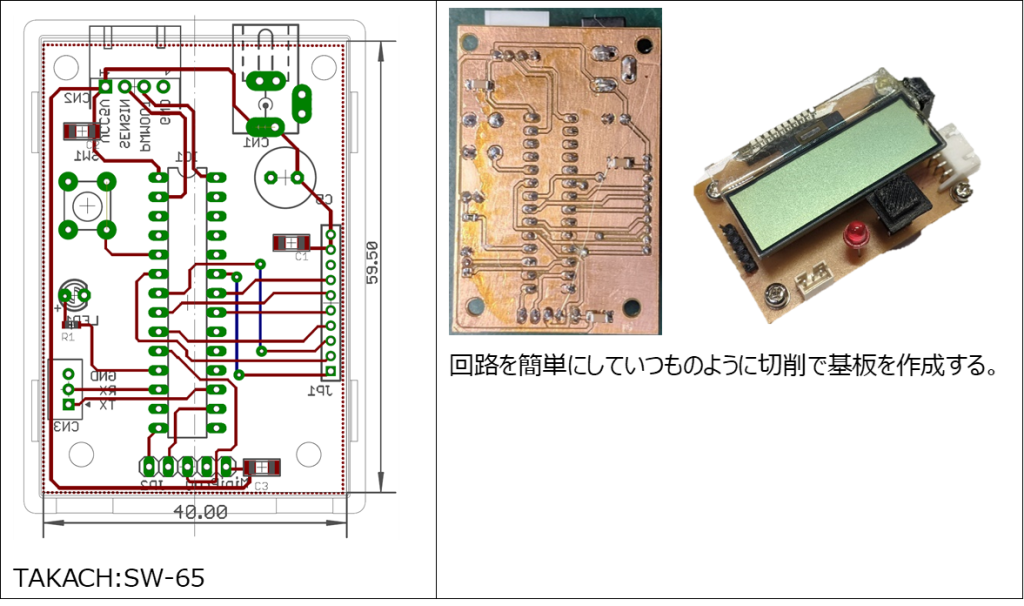
回路図
今回基板切削で作ってしまいたいので在庫の中からDIPパッケージの簡単なマイコン(Cy8C27443)を選定した。本当はレギュレータも実装した方がよかったのですが、手抜きです。(;^ω^)
パターン設計・基板制作・実装
制御
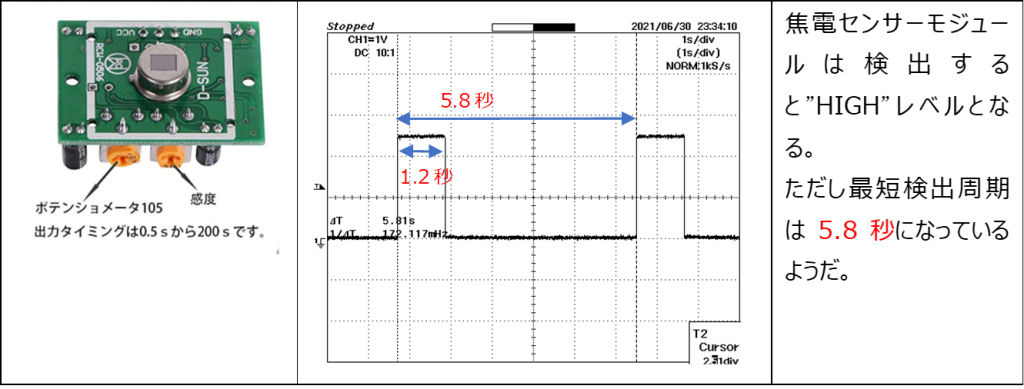
焦電型赤外線検出器の動作
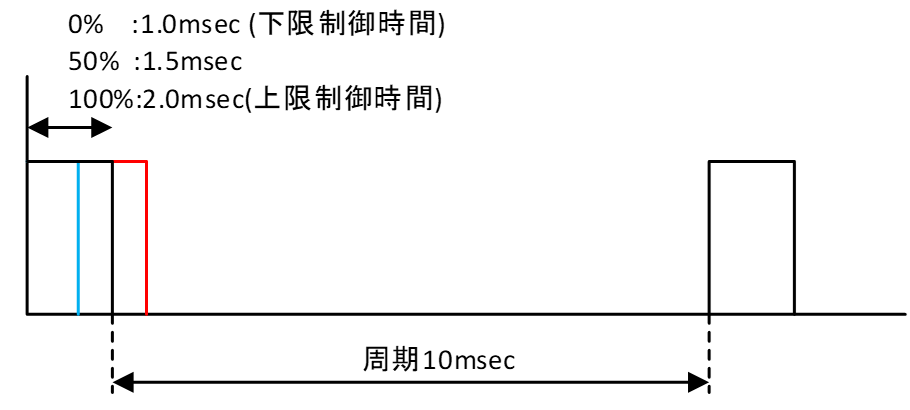
サーボモータ制御
一般的なサーボモータはPPM(Plus Position Modulation)で制御できる。幅1.5msecで大体真ん中あたりの位置となる。
制御周期は10msecくらいで、あまり短いとサーボモーターが反応しない。
制御仕様概要
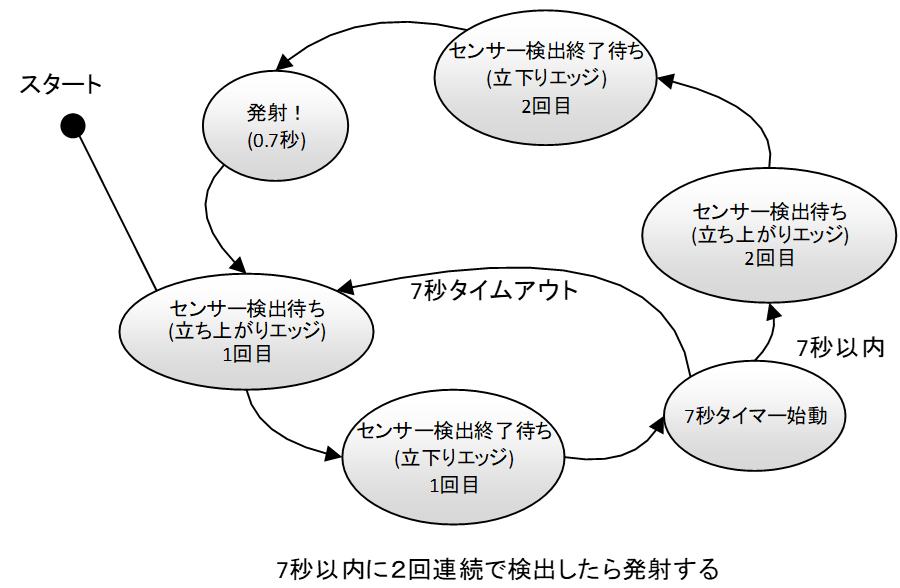
- 焦電センサーは温度の揺らぎやノイズによって誤検出する可能性もあり、7秒以内に2回連続で反応したとき検出対象物(コウモリ)がいると判断する。
- 噴射時間は0.7秒
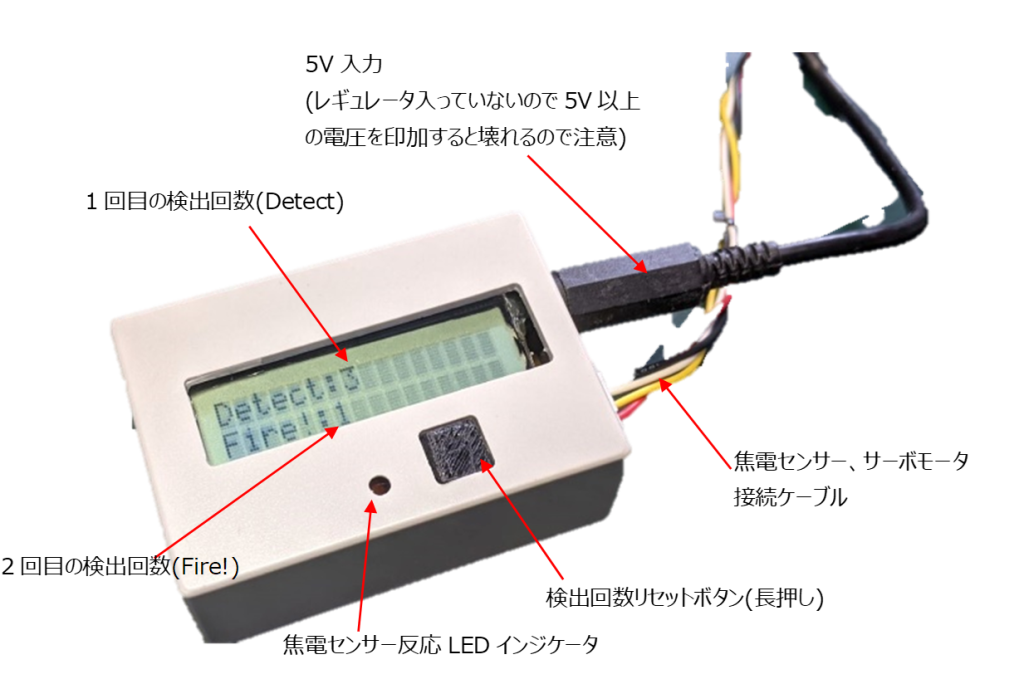
- センサー反応1回目(DETECT)、2回目(FIRE!)のそれぞれ判定した回数を記録しておく。また、この記録は電源が途中で切れたりしてもリセットされないように不揮発領域に保存する。
- 焦電センサーで反応したことがわかるようにLEDインジケータをつける
- ボタン長押しでセンサー検知回数ログのリセット。
- サーボモータは噴射時のみパルスを与えて制御を行い、それ以外はサーボモータ角度制御をおこなわない。(低消費電力化のため)
制御の状態遷移図
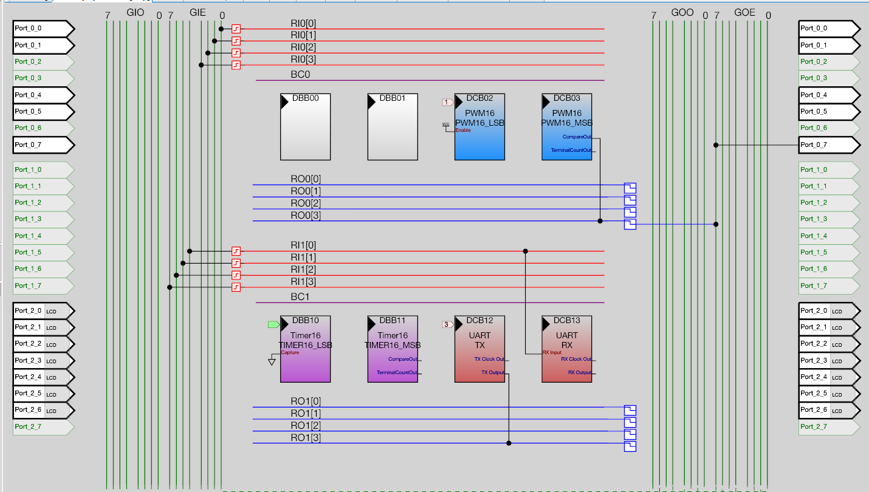
マイコン内部のペリフェラル設定
動作電流
センサー動作時(待機中)・・・約20mA
スプレー噴射時(サーボモータアクティブ時)・・・約120mA
制御ユニットの外観
動作デモ動画
実際の設置状態